
本機は前後4ステーション設計で,TUV,VDE,ULなどの高可撓性ケーブルに適用し,U字型曲げ疲労試験を繰り返し,高速運動中に曲げなければならない。
サンスキー. TUV,VDE,ULなどの高可撓性ケーブルに適用し,U字曲げ疲労試験を繰り返し行い,高速運動中に曲げる必要がある。例えば,機械内部ディスプレイ,高速ドラッグシステムケーブル,機械可動部品の接続ケーブル,機械内部配線,工業ドラッグケーブル,産業ロボットケーブルの反復曲げ疲労試験。
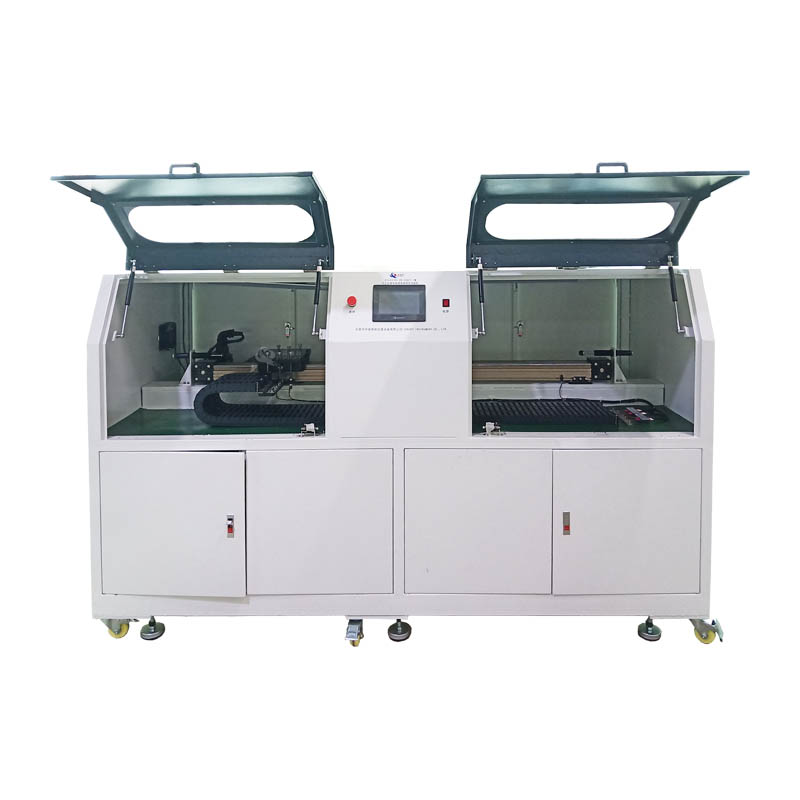
この機械の機能は前後4ステーション設計であり,独立した試験パラメータ設定と試験データ収集と試験結果の識別を持っている。テストの効率を高め,企業のエネルギー消費を削減する。
主にフレキシブル電線とケーブルがチェーンによって駆動されているかどうかを検出するために使用されます。繰り返しの高速U字曲げ試験を経て,短絡,絶縁シースの亀裂,損傷,その他の異常現象がないか。繰り返し高速U字曲げ試験における塑性変形の性能と突出した欠点を検出した。
従順: TUV 2 PFG 2577-08.16,DIN VDE 0295,CRIA 0003.2-2016規格「産業用ロボット専用ケーブル第2部:試験方法」。
1.設計が斬新:前後2駅のダブルレール運転に設計され,独立した試験パラメータ設定と試験データ収集と試験結果を有する。テストの効率を高め,企業のエネルギー消費を削減する。
2.データ収集:PLCを用いてデータ収集を行う,
3.制御と設定:顕微制御とタッチ液晶画面,メニュー式設計:テスト速度,テスト回数,テストプログラム,テスト結果ロックなどの機能,
4.監視測定とリアルタイムデータ表示,4組の監視測定方法は各組のサンプルの回路を監視測定し,そして各組のサンプルの中断状況を自動的に確定し,回路が切断された時の自動停止を検出し,いつでもリアルタイム運行状態を検索することができる。例えば,リアルタイム速度,操作回数,トレーニングストロークなど。
4.1検査ステーション:2レール前後軌道のため,計4つの検査サンプル,
4.2試験方法:水平曲げ,サンプルを相応のチェーンに固定し,その後チェーンを水平方向曲げ試験とする,
4.3電源遮断信号電圧:DC 24 V
4.4試験空間:各ステーションに幅40 mm-125 mmのチェーンを取り付けることができる,
4.5チェーンケーブルの総数:多芯,中断回路の接続方式は直列回路である,
4.6運転ストローク:1000 mm,
4.7試験速度:60回/分。
4.8曲げ半径:固定高さ30 mm-150 mmは上下に調節でき,曲げ半径15 mm-75 mmのチェーンに適用する(サンプルの直径によって,本機械は1つのチェーンのみを含む)
4.9カウントビット数:任意の設定の下で0-999999設定,
4.10女性:サーボモータの使用
4.11機械全体の寸法:1600 mm*幅950 mm*高さ1750 mm
4.12電源:AC 220 V,50 Hz 3500 VA
 WhatsApp:
WhatsApp: 携帯電話:
携帯電話: 今コンタクトしてください
今コンタクトしてください




